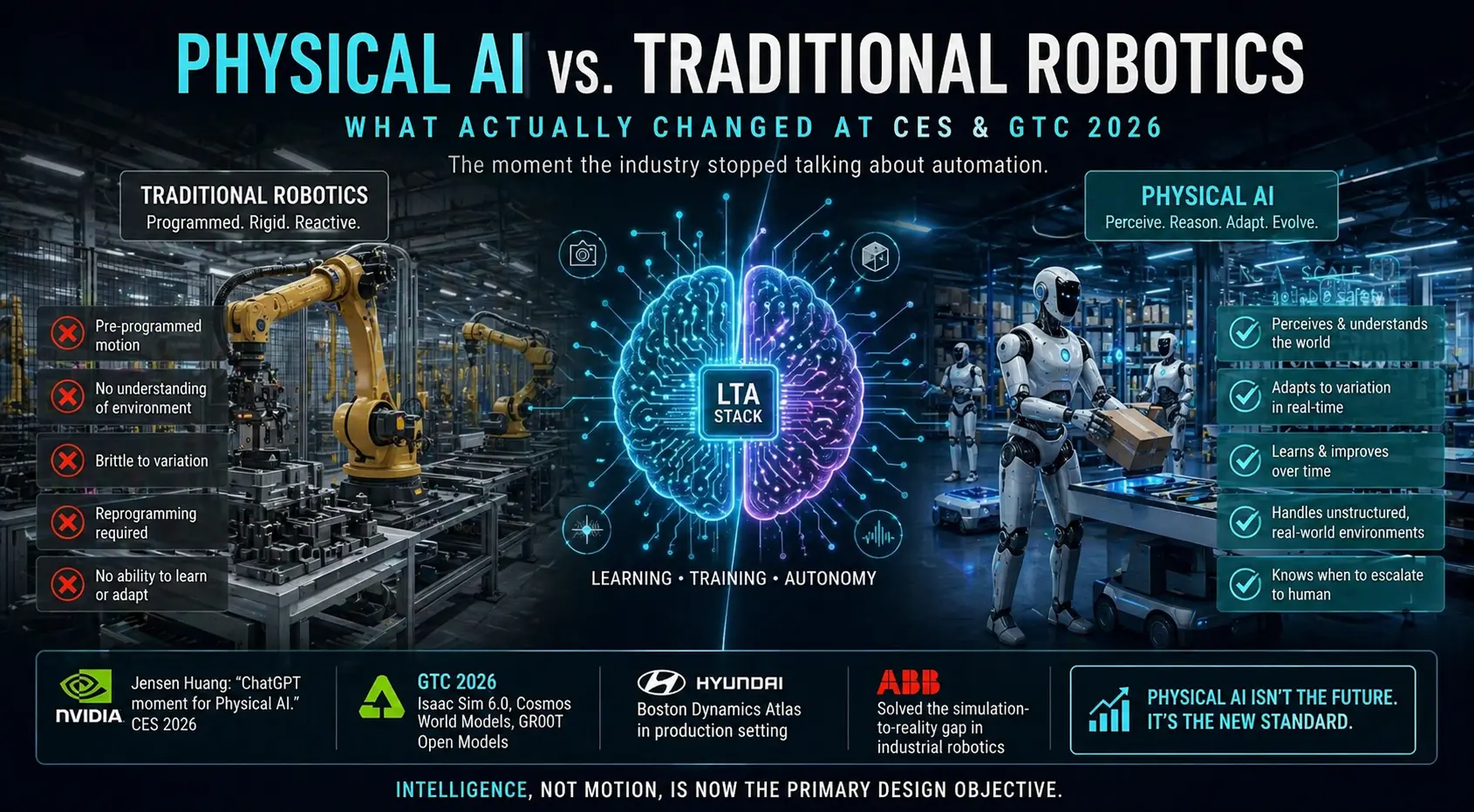
The moment the industry stopped talking about automation
Something shifted at the start of 2026. At CES in January, Nvidia CEO Jensen Huang declared that the ChatGPT moment for physical AI had arrived. At GTC in March, the company unveiled a full suite of tools — Isaac Sim 6.0, Cosmos world models, and GR00T open models — designed to close the gap between digital intelligence and physical machines. Hyundai debuted its Boston Dynamics Atlas robot in a production setting. ABB announced it had resolved the long-standing simulation-to-reality gap in industrial robotics. In the span of weeks, physical AI moved from a promising research category to the dominant commercial theme of the global robotics industry.
The phrase is everywhere. But what does it actually mean — and how does it differ from the industrial automation that factories have relied on for decades?
What physical AI actually is
Physical AI refers to artificial intelligence systems that enable machines to autonomously perceive, understand, reason about, and interact with the physical world in real time. The critical distinction is in the word ‘reason.’ Traditional industrial robots are programmed — they execute pre-defined motion sequences with extraordinary precision, but they have no model of the world they are operating in. A welding robot knows the exact coordinates of the join it must make. It does not know what a join is, why it matters, or what to do if the workpiece is slightly misaligned.
Physical AI systems are different at a foundational level. They perceive their environment through sensors — cameras, LiDAR, radar, force sensors — and build a real-time model of what is around them. They use that model to plan actions, execute them, observe the results, and adapt. They can generalise: a physical AI system trained to handle one class of objects can apply that learned understanding to novel objects it has never encountered. This is the capability that traditional automation cannot replicate, because it was never designed to.
The LTA architecture as the engine of physical AI
At Robotonomous, the Learning, Training, and Autonomy stack is built precisely on this physical AI paradigm. The Learning layer generates training data at scale through high-fidelity simulation — exposing systems to thousands of real-world scenarios, including edge cases that would be impossible or unsafe to test physically. The Training layer builds the AI models that encode perception, planning, and decision-making capability. The Autonomy layer executes those models in real time, with the adaptiveness that physical environments demand.
This is not a refinement of traditional automation. It is a different category of technology — one that treats intelligence, not motion, as the primary design objective.
Why this matters for manufacturing in 2026
The practical implications are significant. Physical AI systems can operate in unstructured environments where traditional robots require meticulously controlled conditions. They can handle variation — in object shape, surface texture, lighting, or workflow — without requiring reprogramming. They can detect their own uncertainty and escalate to human oversight when a situation exceeds their confidence threshold. And they can improve over time, as operational experience generates new training data that refines the underlying models.
For manufacturing leaders evaluating their next automation investment, the question in 2026 is no longer whether to automate. It is whether the system you are deploying has genuine physical intelligence — or whether it is a sophisticated but brittle rule-follower wearing the label of autonomy.