
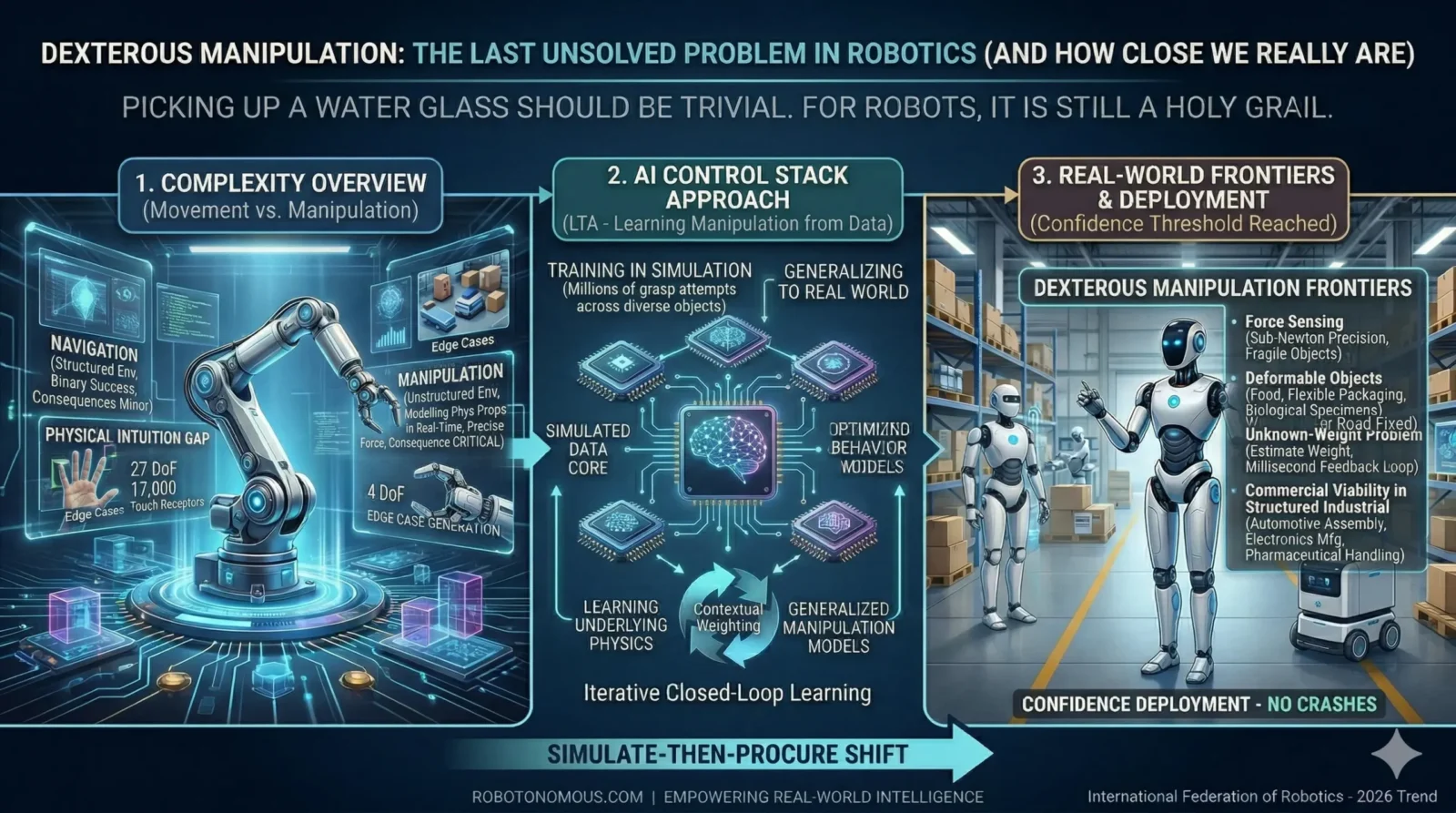
Dexterous Manipulation: The Last Unsolved Problem in Robotics (And How Close We Really Are)
“Picking up a water glass should be trivial. For robots, it is still a holy grail.”The problem that embarrasses robotics engineersAsk a robotics engineer what their field’s greatest unsolved challenge is, and many will give you an answer that surprises...